В Sandacite.BG се сдобихме с няколко български детски играчки роботи от 80-те г. – записахме и видео как работят.
Български детски играчки роботиот 80-те г.
Днес ще разгледаме едни от най-интересните представители на българската игрова електроника – серията симпатични хуманоидни роботи, произвеждани през 1980-те г. във Фабриката за механизирани играчки в Силистра към ДСО Младост София. Там са правени и други подобни играчки, като напр. колички и хеликоптери на батерии – също част от нашата колекция.
Споменатата серия роботи е известна просто като Ро, влиза в производство през първата половина на 80-те и има 3 модела – Ро 1, 2 и 3. Освен тях, пристигна и друг робот – той е от фабриката Детска радост в София. Голяма рядкост е човек да се сдобие с толкова добре пазени устройства – в кутиите, с оригиналната документация – но в нашия случай това щастие беше налице.
Български детски играчки роботиот 80-те г.
На първата снимка в статията виждаме 3-те модела Ро. Те се различават в дизайна на телата си (основно в главата – тя става все по-футуристична), а отделно от това всеки един модел има модификации с различни цветове на частите. Те обаче не влияят на класификацията – обикновено тя стига само до различаването на 3-те модела Ро и това е.
Български детски играчки роботиот 80-те г.
Ро 1 започва серията през 1981, а през 1986 следва Ро 2. Ро 3 е най-редкият от тях – от 1989/90 г.
На гърба си всеки робот Ро има отсек за 2 батерии 1,5 волта R6. Когато те се поставят и се затвори капачето, трябва да се цъкне малко ключе за пуск:
Български детски играчки роботиот 80-те г.
Това задейства редуктора с електрически микродвигател вътре в тялото на робота и той оживява – очите му започват да святкат, той тръгва да ходи и движи ритмично ръце. За да не се препъне някъде, е добре да го поставим на равна повърхност. Изключва се също с ключето.
Другият робот пък е около 2 пъти по-голям от моделите Ро и дори е въоръжен с нещо като бластер, а в лявата ръка – и щит:
Български детски роботизирани играчки
На кутията си той е изобразен на фона на странна, непозната планета. Това не е учудващо, като вземем предвид какво значение отдава тогавашната култура на овладяването на Космоса. През периода 50-те – 80-те г., ако трябва да се покаже колко модерно е нещо, задължително в него се влага някаква космическа символика – название на небесно тяло, придава му се форма на летателен апарат или просто се правят такива илюстрации.
При големия робот батериите се поставят пак на гърба, но сега са 2 бр. 1,5 волта R14.
Български детски роботизирани играчки
Хуманоидът също се движи и размахва въоръжени ръце, докато очите му заплашително святкат. Отдолу на ходилата си има и колелца, за да се плъзга. Датира от средата на 80-те г., най-вероятно 1985 г.
Тези роботи са малки, но много вдъхновяващи експонати. Дори и само с името на единия производител; съсредоточете се и усетете как звучи – ,,фабрика Детска радост – София“.
Български детски играчки роботиот 80-те г.
Ето и видео как се движат новите ни находки. А за ,,странното нещо“ в средата ще ви разкажем тия дни:
Ехаа, вижте български робот от 1968 година в Sandacite.BG!
Български робот от 1968 година
Днес в България все повече се говори за роботика – има училища по роботика, курсове за сглобяване на работи, турнири, изложбени щандове на различни събития и какво ли още не! Те се рекламират като особено подходящи за ученици, защото ги запознават нагледно как работи едно техническо устройство – сглобявайки го, децата научават неговите принципи. Това със сигурност е така, но… какво бихте казали, ако разберете, че още преди 50 години държавата ни се е опитвала да развива роботехническото знание у младите поколения?
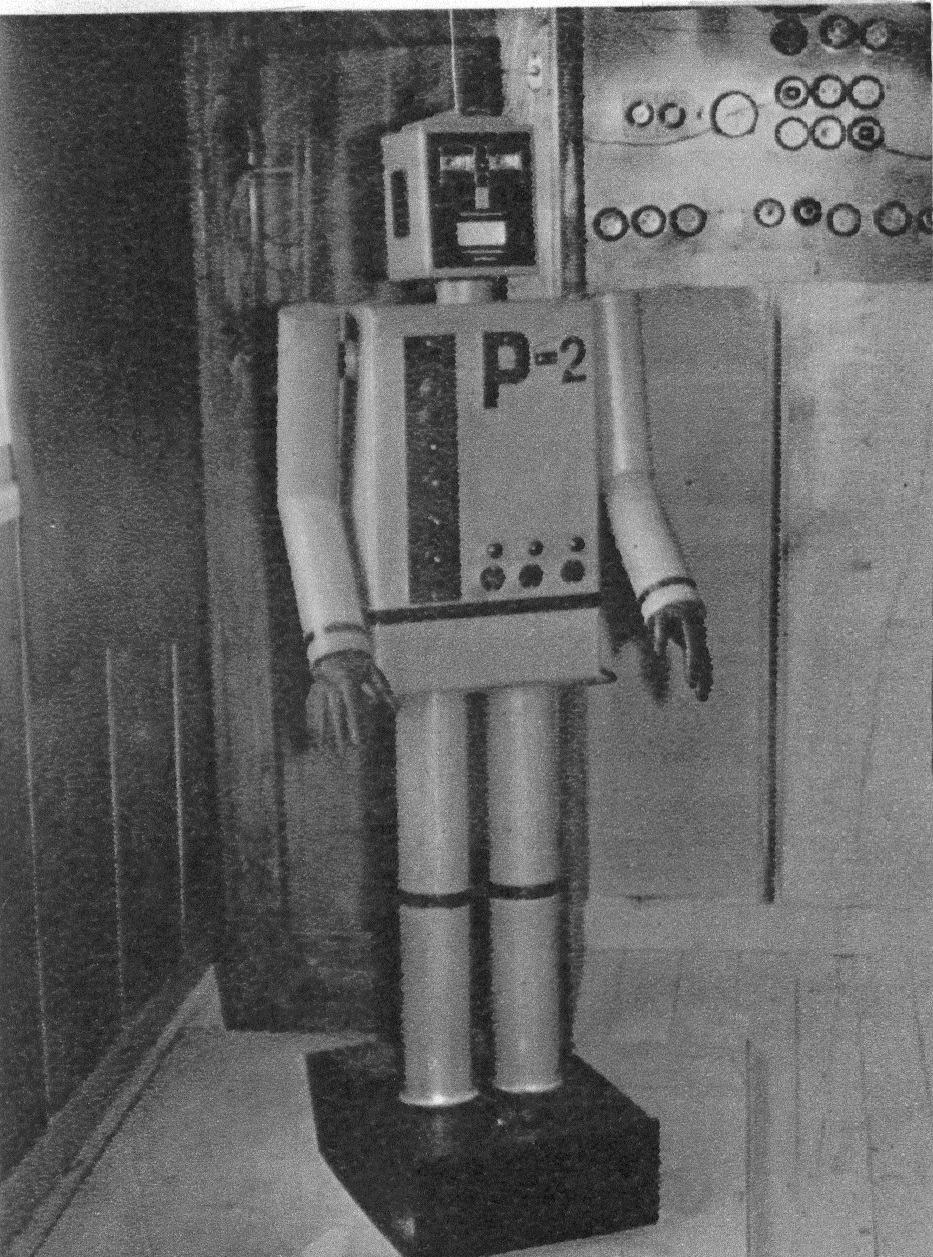
През пролетта на 1968 г. ученици от радиоелектронния кръжок на Политехническата гимназия ,,Неофит Рилски“ в Харманликонструират и изработват истински робот! Той еможел да изпълнява редица авангардни за това време функции: умеел да се включва и изключва сам, движи ръцете и главата си, „крачи“ напред, назад, наляво, надясно… Бивало го да посреща и изпраща гости и даже да изнася лекции и уроци!
Както виждате на снимката, той е означен като Р-2, което ни говори, че преди това на белия свят е имало и друг български робот. За него обаче все още нямаме никаква информация.
Иначе робота Р-2 са го направили сравнително лесно. За изработката му са използвани готови елементи: малки електромоторчета, високоговорител, миниатюрен транзисторен магнетофон, акумулатори от по 6 волта и други подръчни материали.
Дамм… голяма работа беше ТНТМ движението, но вероятно този робот си е останал само на равнище прототип и нищо повече. След това вече идва времето на мащабно производство на роботи в България, но там става дума за по-друг вид такива машини – големи промишлени роботи. За тях обаче ще Ви разкажем по-надире. :D
Вижте в Sandacite.BG защо българските роботи могат всичко!
Български роботи могат всичко
Това четиво от Сандъците– Sandacite ще Ви запознае с първите произведени в България роботи– от всякакъв вид и характер. Предлагаме екскурзията във времето да започне сега!
Има доста определения за понятието промишлен робот. Но с каквито и думи да наричане нещата, истината остава винаги една — става дума за имитация на човешки действия. Или по-точно — замяната на човешката дейност с помощта на машини. Промишленият роботтрябва да замени човека там, където за него няма място — под земята, в завода, под водата, във въздуха, в Космоса и така нататък. Списъкът на страните-производителки на промишлени роботи е твърде кратък — този факт също не се нуждае от подробно обяснение. Казано с едно изречение, тяхното производство е много сложно и скъпо. Но веднъж произведени, промишлените роботи бързо се „откупват“ и ефектът от тяхното внедряване е повече от очевиден.
От 1979 година и България намира място в споменатия кратък списък на страните-производителки на промишлени роботи. Нещо повече – нашата страна е с ранг на координатор в СИВ в това направление. Във връзка с изготвените планове за роботизация у нас са разработени т.н. еталонни работни места, в които да се прилагат промишленитеманипулатори и роботи. Идеята е изделията на Комбината за промишлени роботи ,,Берое“ в Стара Загора бързо да намерят своето място в производствената сфера. Идеята е била течение на времето все повече работни места да бъдат еталонизирани и адаптирани към възможностите на произвежданите у нас промишлени роботи и манипулатори.
Говорейки за българските роботи, не можем да не споменем една твърде интересна особеност, отнасяща се до тяхната конструкция. В световното производство на роботи тогава са оформени три конструктивни тенденции. Първата е свързана с производството на универсални роботи и се развива най-вече от САЩ. Универсалният робот има редица предимства – лесна адаптация към околната среда (респективно смяната на операциите), притежава голяма гъвкавост по отношение на програмирането. За съжаление, цената му свежда до нула положителните черти. Единственият изход от това деликатно положение е производството на големи серии, което намалява значително цената, но по времето на зараждането на българските промишлени роботи това е все още въпрос на по-близко или по-далечно бъдеще.
Другата тенденция в роботиката е свързана с производството на специализирани роботи. През 70-те години нея залагат най-често японските производители. Роботите от този вид са със значително намалени възможности и минимален брой степени на свобода, имат опростено управление и сравнително ниска цена. За сметка на това те трудно се преустройват и се налага разработването на широка номенклатура, което затруднява кзкто самото производство, така и обслужването и ремонта.
Български робот Balgarski robot
Във всяко нещо съществува така наречената „златна среда”. Роботиката не прави изключение от това старо правило. Златната среда в случая е изграждането на модулни роботи. Това е именно пътят, избран от българските специалисти. В този случай различните по вид и тип роботи се монтират от произвежданата гама модули. Степента на унификация в този случай достига 80 процента, което е отлично постижение в тази област. Така роботът става максимално универсален, като запазва ниската си цена. Но какво по-точно представляват българските роботи ? Нека за по-голяма простота се опитаме да ги класифицираме по тяхната сложност.
Български роботи Balgarski roboti
На снимката: промишлен робот РБ210
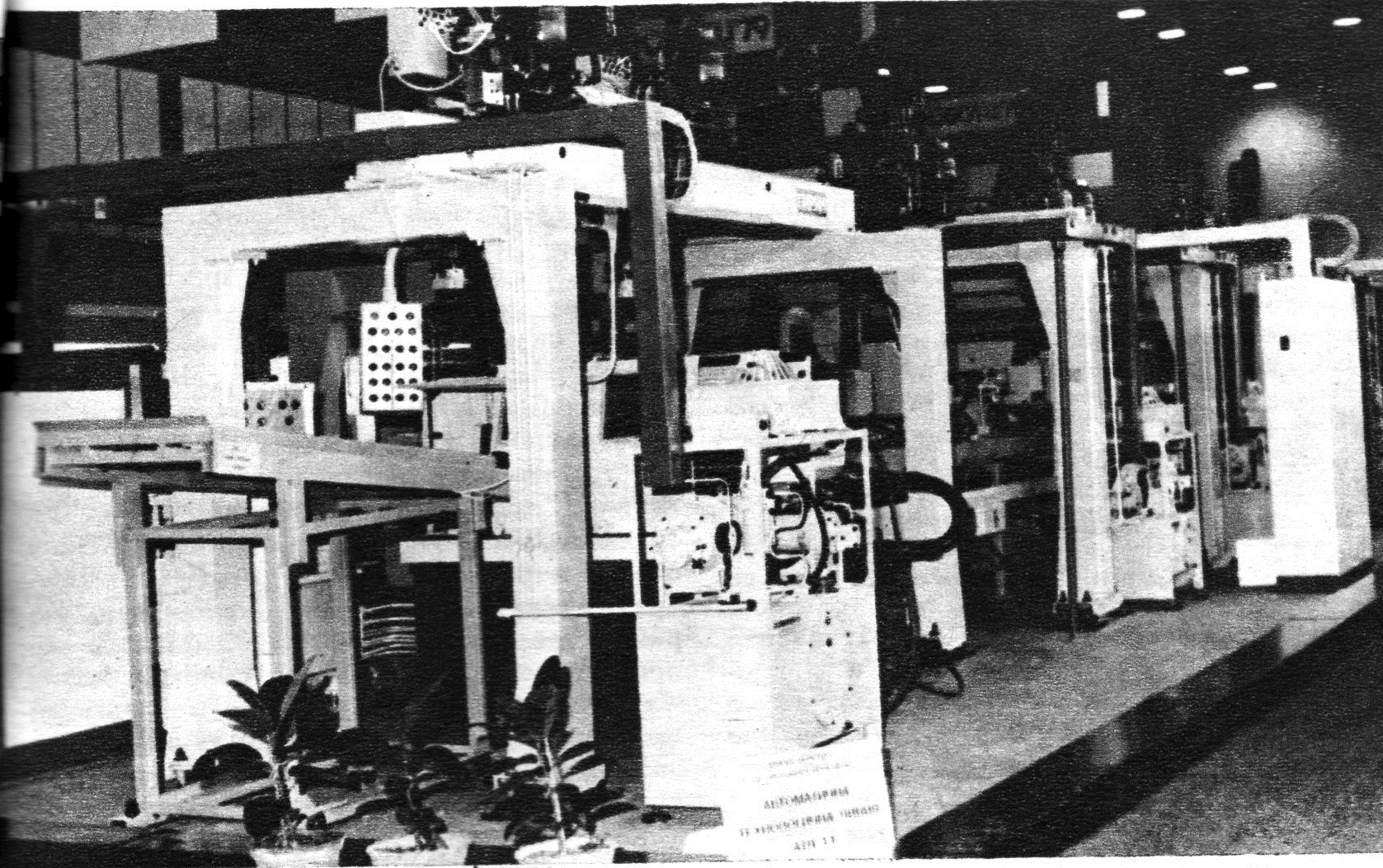
ПНЕВМАТИЧНО БАЛАНСИРАНИ РЪЧНИ МАНИПУЛАТОРИ. Този тип манипулаториса произвеждани в четири варианта с товароподемност до 250 килограма. Те намират широко приложение в ковашко-пресовото и щамповъчното производство, като осигуряват пълно механизиране на спомагателните операции при повдигане и транспортиране на товари, детайли и възли. Усилието, което е необходимо за задвижването на ръчните манипулатори, не надвишава 5 килограма, което значително облекчава труда в редица тежки ме само в преносния смисъл на думата производства.
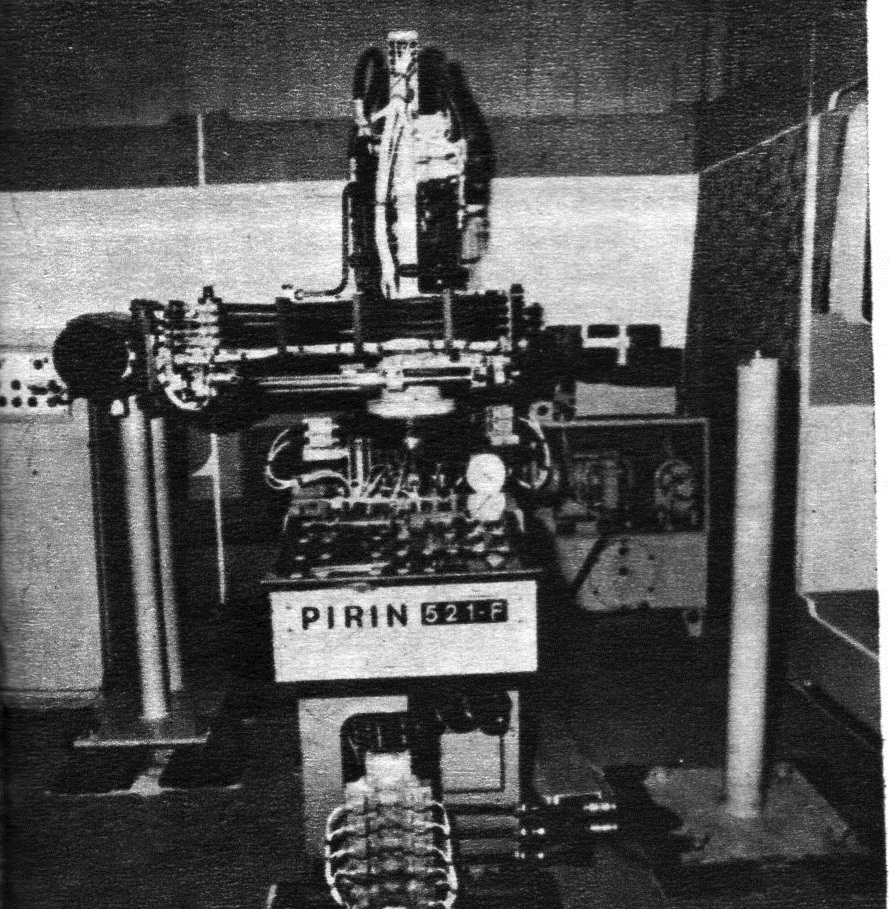
ПОРТАЛНИМАНИПУЛАТОРИ ПИРИН. Те са разработени в продуктова фамилия с товароподемност до 40 килограма. В зависимост от конструктивното решение имат точност при изпълнение на операциите (така нареченото позициониране) около половин милиметър и се използват при автоматично захранване с ротационно-симетрични детайли на редица програмни металорежещи машини. Хидравличното задвижване и твърдото програмно управление на този вид манипулатори осигурява значителни икономически и експлоатационни предимства.
СТОЯЩИМАНИПУЛАТОРИ ПИРИН. Произвеждани са в четири модификации, като различните варианти са построени на агрегатния принцип. Те имат точност на позициониране около половин милиметър и товароподемност до 20 килограма. Стоящите манипулаториот фамилията Пиринса използвани за захранване на металорежещите машини с къси ротационни детайли. Те имат електрохидравлично задвижване и автоматично управление, като е предвидена и възможност за ръчни корекции.
Роботи Пирин Roboti Pirin
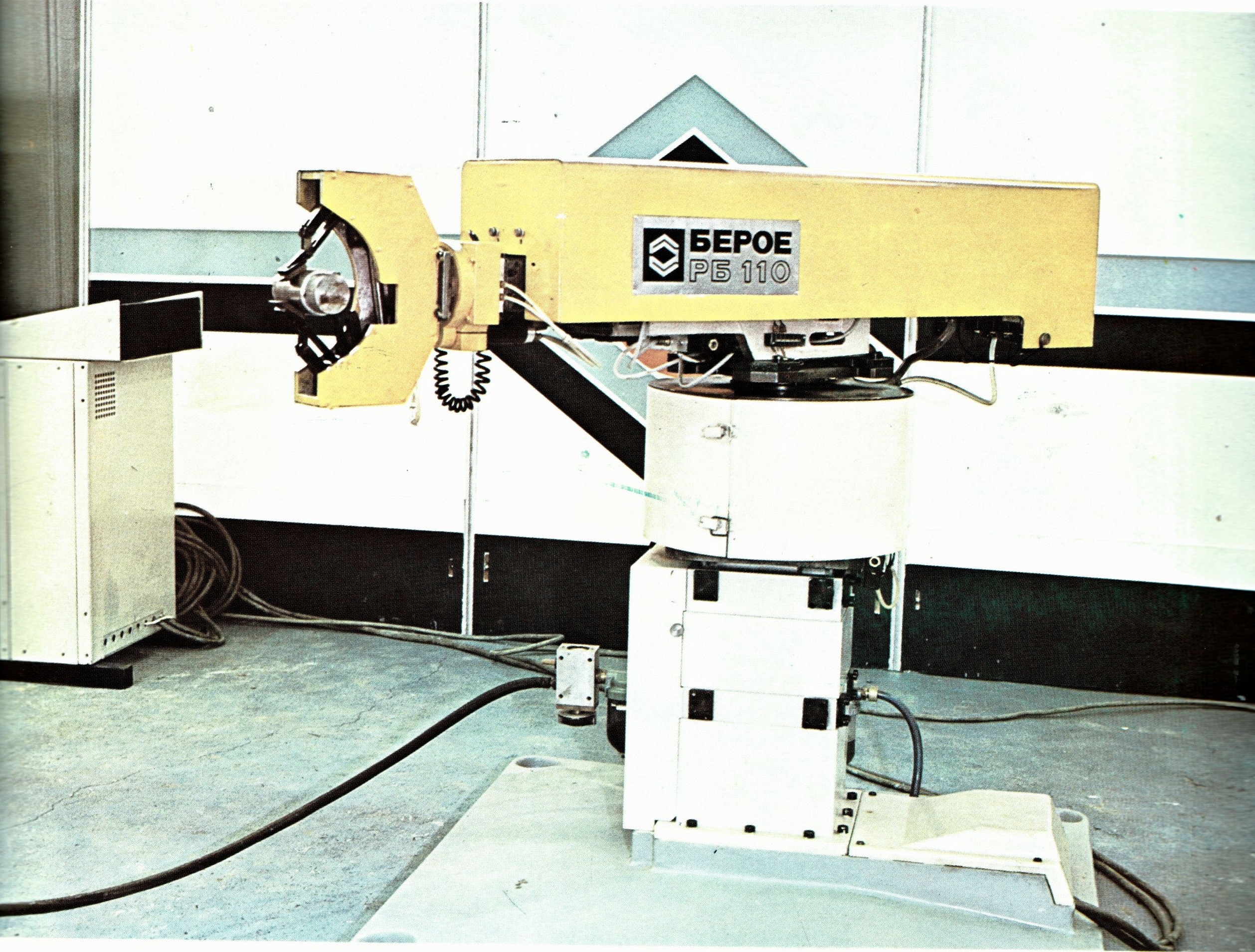
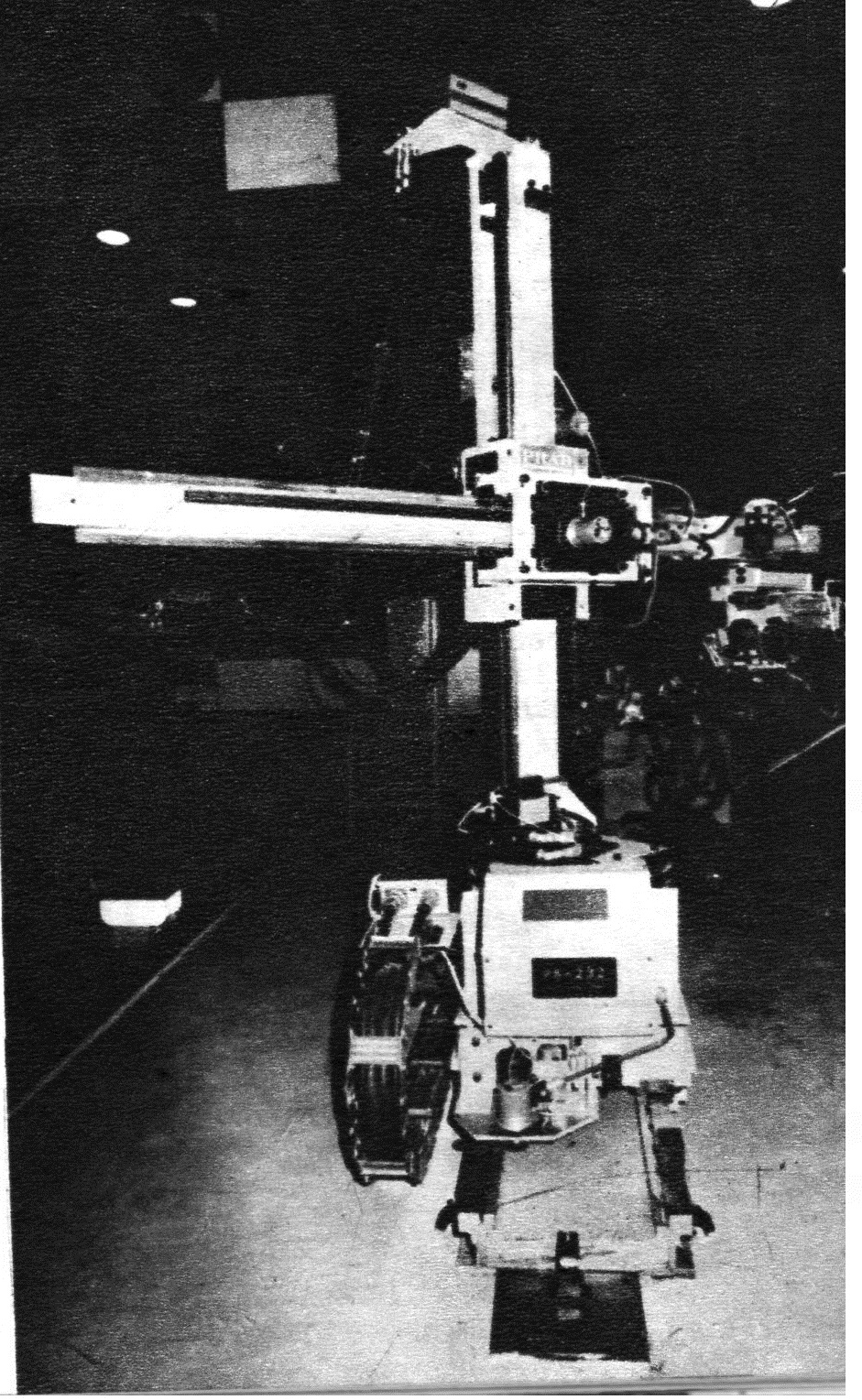
ПРОМИШЛЕНИ РОБОТИ РБ 110 (на първата снимка). Имат четири степени на свобода и при максимална товароподемност 10 килограма имат точност на позициониране около половин милиметър. Те служат за автоматизиране на спомагателните операции з машиностроенето и някои други области на производството като получаването на пластмаси, стъкло, керамика. Промишлените роботиот серията 110се задвижват пневматично и се управляват дистанционно, което гарантира максимална безопасност на обслужващия персонал. Програмирането им се осъществява стъпка по стъпка, което е твърде удобно от практическа гледна точка. Управляващият електронен блок работи в три режима: „Програмиране“, „Работа“ и „Проверка на паметта“, като последният режим гарантира точността на зададената програма във всеки момент по време на експлоатацията.
Български роботи Balgarski roboti
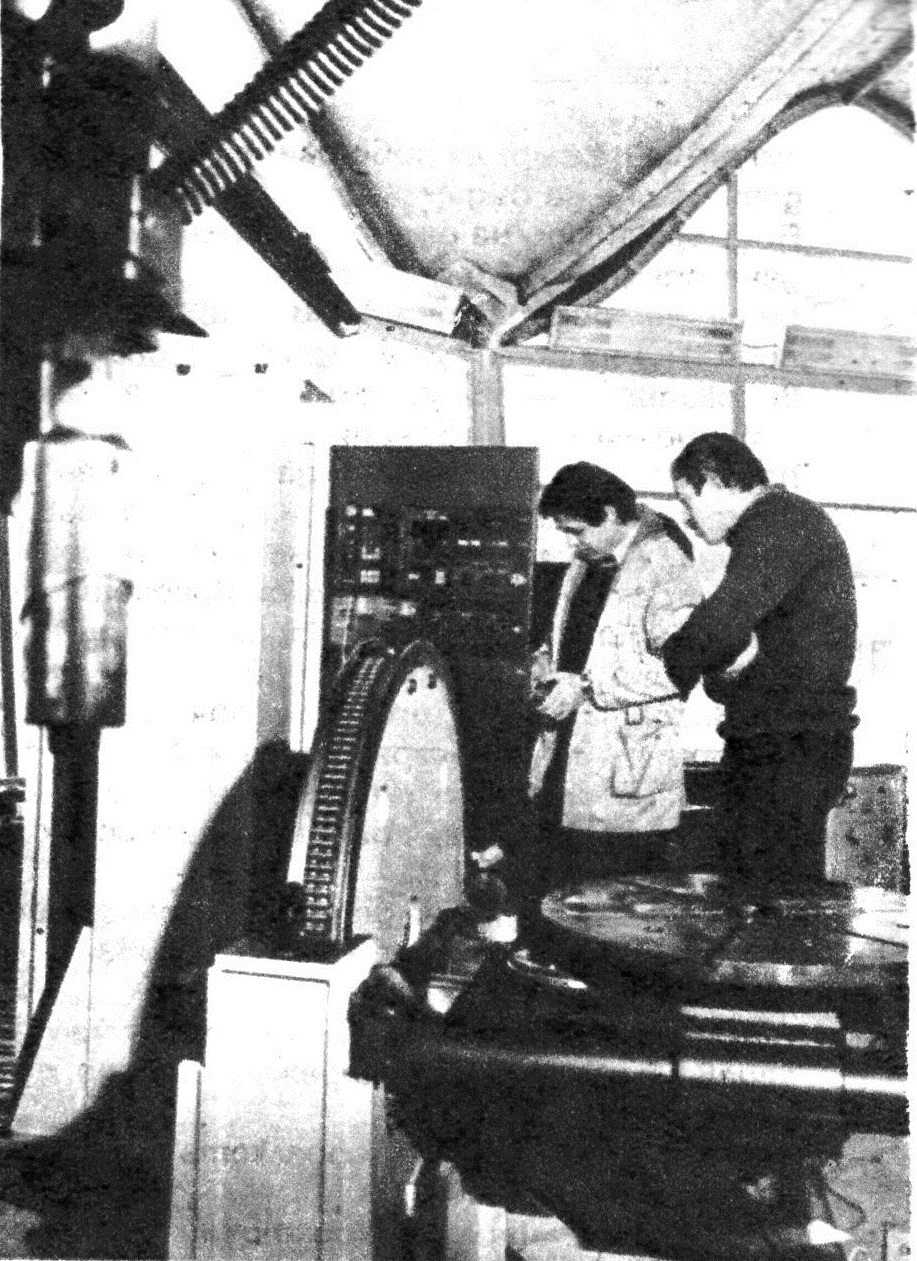
ПРОМИШЛЕНИ РОБОТИ РБ 210. Те имат шест степени на свобода — максимална цифра в световната производствена практика, като конструкцията е изградена от въртящи се кинематични двойки. При товароподемност до 15 килограма имат точност на позициониране около 5 милиметра. Този вид български роботи имат електрохидраалично задвижване и работят в сферична координатна система. Основното им предназначение е да нанасят прахообразни покрития и бои. В паметта на роботите от фамилията 210могат да се запишат до 75 паралелни програми с продължителност на технологичните операции до 900 секунди, като прехвърлянето от една програма на друга става само за 3 секунди. Интересното тук е, че роботът се обучава ръчно на така наречена учебна скорост, като операторът имитира необходимата технологична операция, която се запомня от паметта. След това управлението се превключва ка работна скорост, която е няколко пъти по-висока от учебната. Този вид програмиране осигурява големи удобства при експлоатация и е много евтин, защото не се използува математическо осигуряване.
Български роботи Balgarski roboti
ПРОМИШЛЕНИ РОБОТИ РБ 230. Това са най-усъвършенстваните роботиот серията. Те да използвани за автоматизиране на основните и спомагателните технологични операции. При товароподемност до 600 килограма те имат точност на позициониране около един милиметър, Този вид роботи също имат шест степени на свобода и работят в цилиндрична координатна система. Управляват се от цифрова програма, като за тази серия Институтът по техническа кибернетика и роботика към БАН е разработил усьвършенствано микропроцесорно управляващо устройство, създадено изцяло с български елементи!
С един още по-усъвършенстван, макар и по-късен български робот, можете да се запознаете ТУК.
Заваряването на детайли в машиностроенето е операция, при която твърде добре проличава ефектът от замяната на човешката ръка с тази на робота. Освен че е отговорен и трудоемък, процесът на заваряването се отличава и с опасни за човека светлинни и енергийни излъчвания и с отделянето на големи количества отровни газове.
Именно поради тази причина, след задълбочено изследване на възможностите на България за производство на компонентите за сложни комплекси за електродъгова заварка като механични конструкции, управляващи устройства, заваръчни съоръжения и т. н„ през 1983 г. започва развойна и внедрителска дейност, която не след дълго поставя България на едно от водещите места в СИВ. Колективи от Института по техническа кибернетика и роботика към Българската академия на науките и от Института по заваряване ,,Патон“ към Украинската академия на науките започват съвместна работа за създаване на първия в социалистическите страни подобен комплекс. Начело на колектива от съветска страна е академик Борис Патон, от българска — чл. кор. Ангел Ангелов, а отговорни конструктори са съответно проф. Ф. Кисилевски и cm. н. с. Г. Начев.
Резултатът от това сътрудничество е роботизираният комплекс РБ 250, чието производство започна през 1983 г. Научноизследователския комплекс по роботика ,,Берое“ в Стара Загора . Той е предназначен за заваряване на големи детайли и ще намери приложение във всички сфери на машиностроенето, където заваръчният процес е основна операция при компоноване на готовите изделия. От началото на 1983 г. българският роботРБ 250 работи успешно в завод „Ленинская кузница” в Киев, където изпълнява отговорни заваръчни операции. Постъпват още заявки, а интересът довежда до пускането в производство на нови бройки. Нещо повече – на проведената през 1983 г. изложба за заваръчна техника в град Есен (Германия) показаните роботиот този клас с нищо не превъзхождат българския РБ 250.
Какво представлява роботизираният комплекс за заваряване? Къде всъщност се крият неговите предимства?
Най-общо казано, РБ-250включва в себе си:
микропроцесорно управляем токоизточник,
манипулатор на горелката с 5 степени на подвижност,
два манипулатора на детайла с по две степени на подвижност,
българскителоподаващ механизъм „Полиизаплан“ (защитен патентно в много страни) и
управляващо устройство с възможности да контролира едновременно 9 степени на подвижност.
За построяване на комплекса са използвани компоненти, произвеждани в социалистическия лагер.
Български робот Balgarski robot
За да разберем добре значението на роботизиранияначин на заваряване, трябва да си припомним дейностите, извършвани от човека-заварчик. А те не са никак малко. След ориентиране на детайла в положение, което е най-подходящо за нанасяне на заваръчния шев, заварчикът регулира тока и напрежението на дъгата. Ръката му придвижва горелката до началото на шева и се задържа на мястото до запалване на дъгата. После заварчикът придвижва горелката по продължение на контура нашева. Накрая горелката се връща в изходно положение, а източникът на ток се изключва. Някои от тези дейности поне привидно изглеждат присъщи само на човека. Например, запалването на дъгата, твърдят специалистите, е умение, което човек придобива на чисто интуитивна основа, като възприема опита на учителя си. При робота за заваряване обучение също е възможно, но пътят на възприемане не е интуитивен. Той минава през подробен анализ на преходния процес и завършва с пълното му описание на език, понятен за робота.
Освен че заварчикът следи шева, той поддържа оптимален режим на дъгата с приближаване или отдалечаване на горелката. Двете дейности се извършват на базата на визуална информация. Този проблем е намерил просто решение при българския робот РБ 250. Задачата за следене на шева е отпаднала, тъй като е въведено ограничението той винаги да се намира на едно и също място и роботът да може да описва неговата конфигурация със задоволителна точност. Това означава, че са постигнати точни движения на роботаи е необходимо детайлите да бъдат закрепвани прецизно. Поддържането на оптимален режим е сведено преди всичко до управление параметрите на токоизточника и скоростта на подаване на тел. Тук е скрита тайната на високата производителност и на качеството на получаваните шевове. Това се постига без работникът да е подложен на вредните въздействия на процеса заваряване. А самият робот не знае умора и е в състояние да поддържа високата си производителност при трисменен режим на работа. За една смяна той заменя трима висококвалифицирани заварчици.
Процесът на програмиране на българския робот РБ 250 е близък до начина на словесно описание на технологичния процес. Тази последователност от действия е следната:
ориентиране на детайла в положение, което е най-подходящо за извършване на заварката;
настройване на токоизточника — задаване на тока и напрежението на дъгата;
придвижване на горелката до началото на шева;
включване на токоизточника;
задържане на място до запалване на дъгата и формиране началото на шева;
придвижване на горелката по протежение на контура на шева със запалена дъга;
при достигане края на шева се задържа на място, докато се оформи край на шевовата конфигурация; срязва се заваръчната тел;
изключване на токоизточника
връщане на горелката в изходно положениe
Български робот Balgarski robot
Обикновено практиката предлага шевове, които могат да се представят като съвкупност от стандартни участъци. Това довежда до някои грешки, които роботътможе сам да открива при положение, че цялата траектория е правилно зададена. Освен това трудно може да се определи точно технологичният режим без пробна заварка. Българският робот РБ 250 позволява по време на работа да се коригират технологичните параметри, като директно се наблюдават резултатите от корекцията. Това значително съкращава времето за програмиране.
Освен това роботътполучава и информация от външни източници. Той може да извършва логическа обработка на тази информация и да взема някакво решение, чиято реализация е конкретно действие на робота или подаване на сигнал навън, по който външен механизъм извършва някакво действие. Например приетият сигнал може да идентифицира детайла за заваряване, ако той е от група възможни детайли. След разпознаването му роботътактуализира програмата, описваща обработката на този детайл, и извършва интерпретацията й. Освен това приетият сигнал може да идентифицира определени конструктивни особености за конкретен тип детайл и това да доведе до изпълнение на определени клонове на програмата, отразяващи тези конструктивни особености.
За целта е разработен съответен език за описване действията на роботаза електродъгова заварка. Той се състои от краен брой изречения или инструкции, като по съдържание една инструкция е еквивалентна на точка от показаното по-горе словесно описание. Групата на инструкциите, описващи движението на робота, са също така интересни. Техните аргументи трябва да дефинират съответно права линия и дъга от окръжност. Най-простият начин е, като за правата се използват две точки, а за дъгата три, след което роботът послушно се движи по зададената траектория.
Бъдещето е предлагало на българския роботРБ 250 много повече от това да бъде обикновен работник-заварчик. Разработеният комплекс е служел като основа за създаване на заваръчни участъци. В тях е била постигната пълна автоматизация чрез подходящо комбиниране на различни заваръчни роботи. Към големите роботизирани комплексиот типа РБ 250 се прибавят по-малки заваръчни роботи, което ще позволи да се обхване голямо многообразие от технологични задачи. Целият заваръчен участък ще се управлява от голяма електронноизчислителна машина като компонент от системата за автоматично управление (САУ).
В описания вид РБ 250предвижда много технологични ограничения, поради което логично следващата стъпка в неговото доразвивано и усъвършенствване е създаването на адаптивна система за управление. Подобна система позволява роботът сам да следи конфигурацията на заваръчния шев и да коригира предварително зададената програма в зависимост от особеностите на всеки детайл. Затова през средата на 80-те години конструкторските колективи в България и СССР продължават своята работа по усъвършенстване на описаната конструкция и реализиране на новите идеи, залегнали в бъдещите планове.

")
")
")
")
")
")
")
")
")